ECCV 2022
Learning Phase Mask for Privacy-Preserving
Passive Depth Estimation
Abstract
With over a billion sold each year, cameras are not only becoming ubiquitous, but are driving progress in a wide range of domains such as mixed reality, robotics, and more. However, severe concerns regarding the privacy implications of camera-based solutions currently limit the range of environments where cameras can be deployed. The key question we address is: Can cameras be enhanced with a scalable solution to preserve users' privacy without degrading their machine intelligence capabilities? Our solution is a novel end-to-end adversarial learning pipeline in which a phase mask placed at the aperture plane of a camera is jointly optimized with respect to privacy and utility objectives. We conduct an extensive design space analysis to determine operating points with desirable privacy-utility tradeoffs that are also amenable to sensor fabrication and real-world constraints. We demonstrate the first working prototype that enables passive depth estimation while inhibiting face identification.
Results
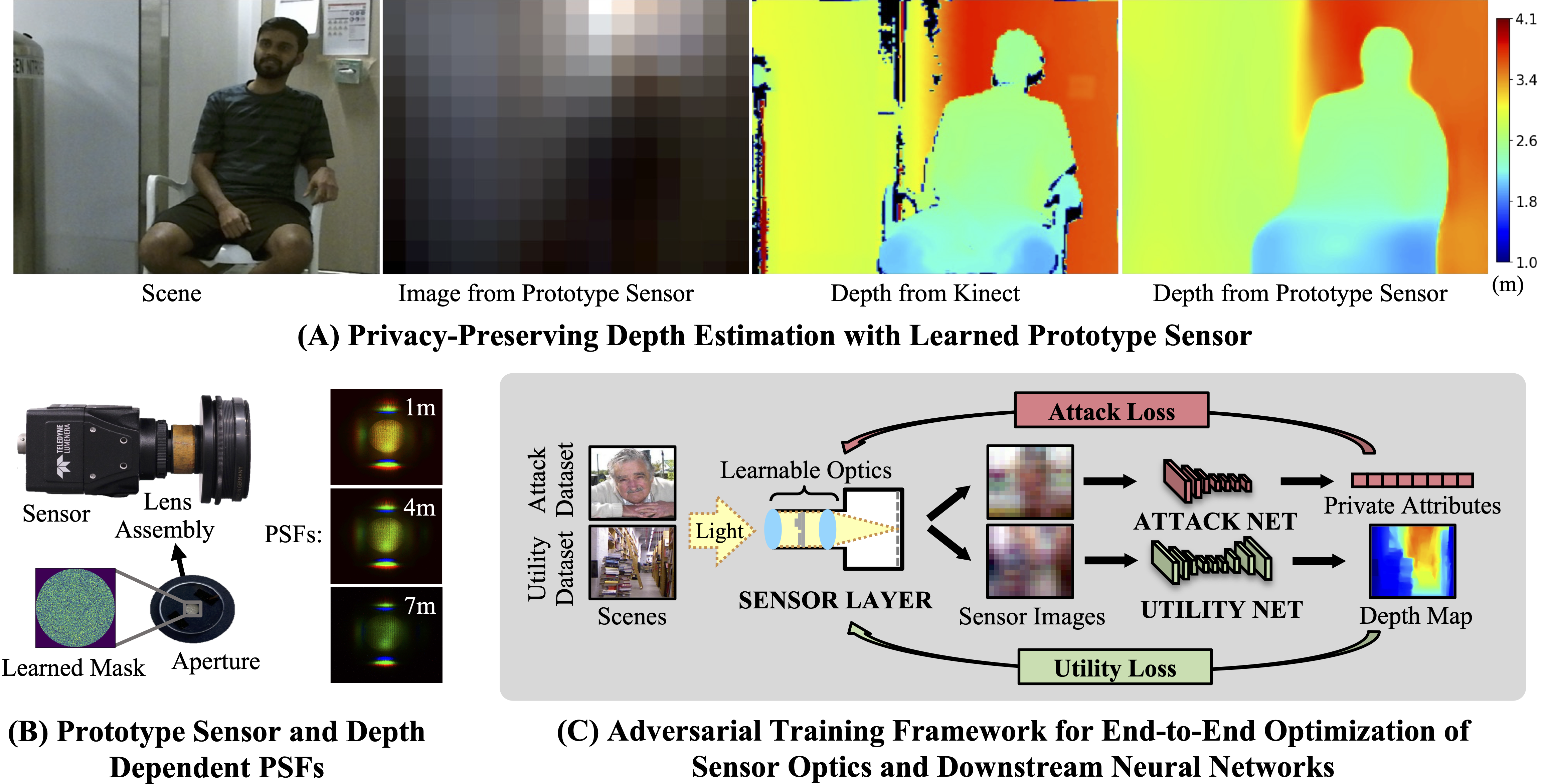
Private Depth Estimation with our Prototype Sensor
We show the depth reconstruction performance of our prototype sensor in the wild. Row 1: all-in-focus images of the scene. Row 2: Images captured by our prototype sensor (16 × 16 pixels). Row 3: Ground Truth depth map from Kinect v2. Row 4: Predicted depth map from our depth estimation framework. The mean depth estimation accuracy (δ1) for the above results is 83.73%. This is consistent with the 84.69% accuracy of our simulated results on the NYUv2 Dataset.
